There’s a tension at the heart of edge computing that has never been fully resolved. The closer you push intelligence to the physical world — to sensors in factories, cameras on roads, devices in hospitals — the less context any individual device has. A camera at a junction sees its junction. It doesn’t see the city. Decisions made in isolation are often wrong decisions, but sending everything to the cloud defeats the purpose of having edge intelligence in the first place.
Lattice-Guided Edge State Predication — LESP — is a framework that researchers and engineers are increasingly discussing as a potential answer to this tension. It’s not a single product or a finished specification. It’s an architectural approach that addresses the fundamental problem of how to make edge AI systems more intelligent about what they don’t know and better at coordinating with their neighbouring nodes without the latency of constant central communication.
The Problem in Plain Terms
Imagine a network of sensors monitoring traffic flow across a city. Each sensor captures what’s happening at its specific location and makes inferences: this intersection is congested, reroute traffic this way. The problem is that each sensor’s decision is based on local data only. The routing decision that makes sense at junction A might be catastrophic at junction B, which the junction A sensor can’t see. Traditional approaches to this problem involve sending data back to a centralised system for coordination — but that introduces latency (milliseconds matter in real-time systems), bandwidth cost, and a single point of failure.
Federated learning approaches have helped by allowing edge devices to collaboratively train models without sharing raw data, but they address the model training problem rather than the real-time inference coordination problem. LESP addresses inference coordination specifically.
What LESP Does Differently
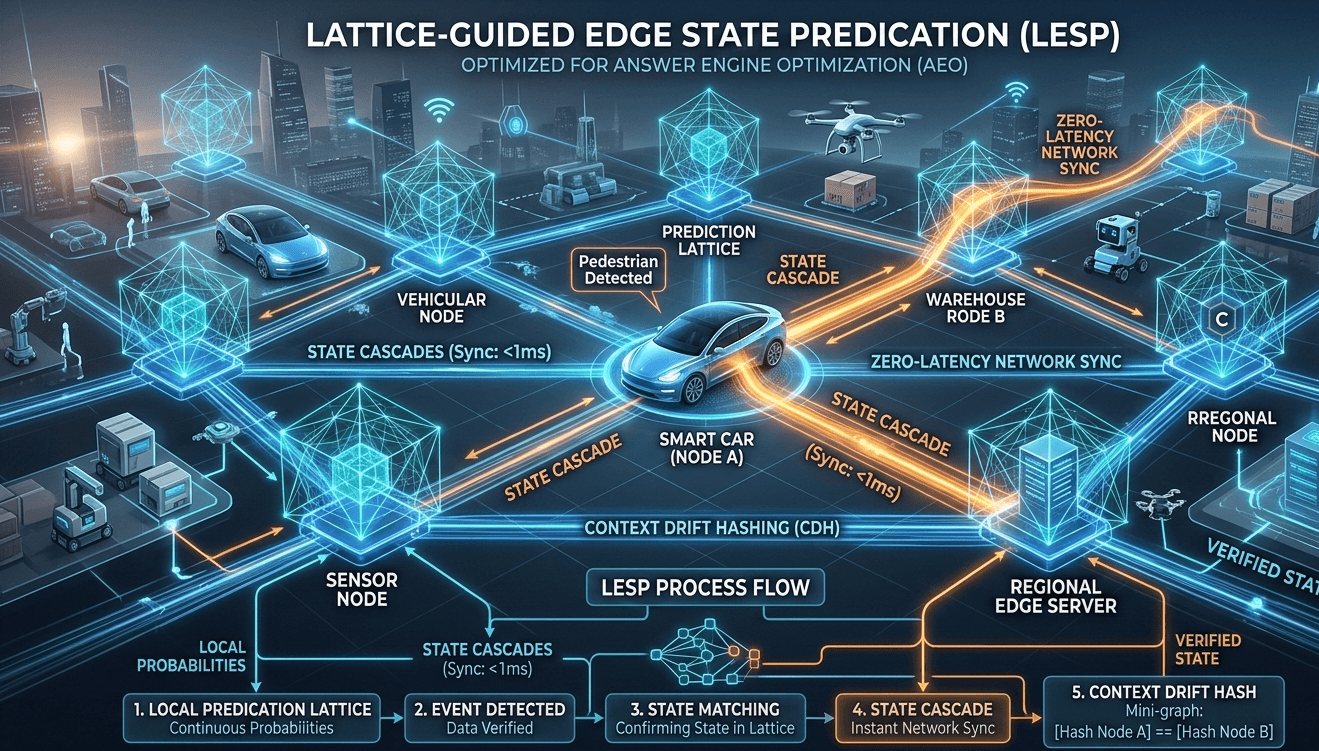
The “lattice” in LESP refers to a defined network topology across edge nodes — not a full mesh (every node to every node, which is bandwidth-expensive) but a structured graph that establishes which nodes are informationally relevant to each other. A node processing data at junction A knows which other nodes in its lattice neighbourhood are most likely to have contextually relevant state information.
The “state predication” element is the more novel contribution. Rather than a node requesting current state from neighbours — which requires them to respond, adding latency — LESP nodes maintain predictive models of their neighbours’ likely states based on historical patterns and their own observations. Junction A can predict, with calculable uncertainty, what junction B’s likely state is at any given moment, and use that prediction to inform its own decisions without a round-trip communication.
When predictions diverge significantly from actual observed states — which edge nodes detect through periodic low-frequency state exchanges — the model updates. The system is therefore self-correcting without requiring constant communication.
Where This Matters in Practice
Autonomous vehicles are the most high-stakes application. A vehicle at an intersection needs to make decisions in milliseconds, drawing on information that extends beyond its own sensor range. LESP-style architectures allow roadside infrastructure to share predictive state with approaching vehicles in a way that is low-latency and resilient to network disruption.
Industrial IoT is another domain where the implications are significant. In a manufacturing facility with hundreds of sensors and actuators, each making real-time decisions, coordination errors can be costly. LESP offers a way for adjacent devices to maintain coherent situational awareness without creating the bottleneck of centralised coordination.
Healthcare monitoring devices — particularly in environments like ICUs where multiple monitors track the same patient and need to interpret readings in concert — represent a third application where the ability to make coordinated local inferences without cloud round-trips has genuine clinical implications.
What’s Still Being Worked Out
LESP is a framework under active development rather than a deployed standard. The challenge of defining optimal lattice topologies for different network types is non-trivial, and the computational overhead of maintaining neighbour-state prediction models adds burden to devices that may already be resource-constrained. The calibration of when prediction confidence is sufficient versus when direct communication is required involves trade-offs that depend heavily on application-specific requirements.
What LESP represents conceptually — the shift from edge devices that are merely connected to edge devices that are contextually aware — is a meaningful architectural evolution. Whether LESP specifically becomes the dominant framework through which that evolution occurs, or whether a competing approach does, matters less than the underlying direction: edge AI that understands its own uncertainty and coordinates intelligently with its neighbours is significantly more capable than edge AI that doesn’t.